


CONTEXTE
L'Unité Eclairage et Lumière du Cerema Ouest, spécialisée dans les mesures photométriques (éclairement, luminance) s'est associée au Laboratoire Angevin de Recherche en Ingénierie des Systèmes (LARIS) de l'Université d'Angers, expert en robotique, pour concevoir un robot en capacité d'effectuer automatiquement des mesures d'éclairement localisées dans son environnement.
Les premiers terrains de jeux identifiés sont les infrastructures sportives intérieures et extérieures. Une cartographie lumineuse des sites relevés permettra de confronter les performances de l’éclairage artificiel avec les exigences de la norme NF EN 12193 de décembre 2018. Ce projet a reçu un appui d'Angers Technopole dans le cadre de son dispositif Maturation de Projets Innovants en Anjou (MPIA).
C'est dans ce contexte qu'a été rédigé un Cahier des Charges en décembre 2019, pour la conception et réalisation du RObot pour la MesUre de LUX (ROMULUX)
RESUME DU CAHIER DES CHARGES
Les éléments du cahier des charges sont les suivants:
- Un luxmètre, ayant un angle d'ouverture minimal de 150°, positionné à une altitude maximale de 220 mm par rapport au sol
- Un LIDAR, placé à la verticale du luxmètre (Velodyne 360°, 16 plans différents de +15° à -15° par rapport à l'horizontale, portée 100 m)
- Un robot porteur du commerce (exemple JAGUAR de ROBOSHOP), avec une garde au sol minimale de 40 mm.
- Des composants à intégrer obligatoirement (Contrôleurs moteurs, Unité Centrale pour le stockage et la stratégie de mobilité, des batteries à déterminer, différents convertisseurs de tension, switch ethernet, etc...)
- Des composants optionnels à intégrer, pour l'instant, seulement dans l'étude (Centrale inertielle, GPS, etc...)
- Des pneumatiques interchangeables en fonction des supports (parquet, pelouse, glace etc...)
- Une autonomie du robot d'une heure minimale sans intervention externe, pour une vitesse de déplacement comprise entre 3 et 5 km/h (vitesse pour le moment contrainte par les capacités d’intégration du luxmètre)
- Un robot transportable facilement du point de vue ergonomique
LA CONCEPTION
Une première analyse du CDCF a éliminé rapidement la possibilité d'utiliser un robot porteur du commerce (hauteur imposée du luxmètre). De plus, Polytech a souhaité que les axes verticaux du luxmètre, du LIDAR et de l'axe de rotation de l'essieu moteur soient confondus, pour des raisons évidentes de simplification de la mesure du positionnement.
En réponse à ces exigences, le CECP a proposé la conception entière d'un robot, avec un seul axe moteur, composé de deux roues motrices indépendantes, et une ou deux roues folles à l'arrière. La direction du robot se fera donc par le pilotage individuel des deux moteurs.
Pour augmenter le volume utile du robot, le CECP a été autorisé à réduire le cône de mesure du LIDAR pour les faisceaux les plus bas (-15° est devenu -9°)
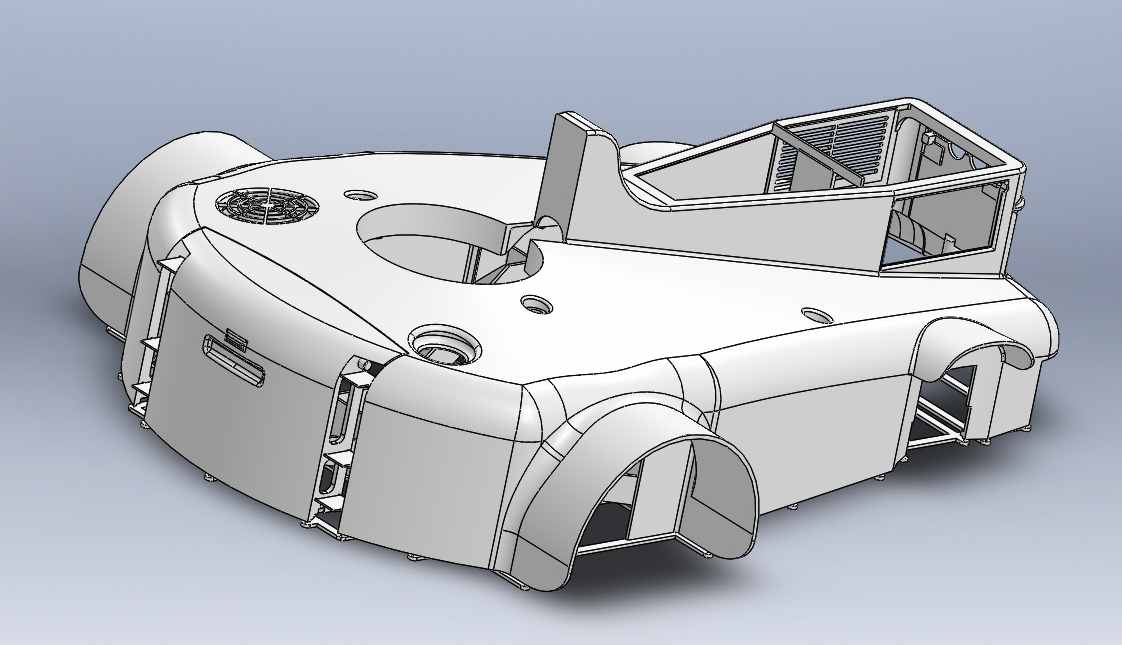
Le dossier de réalisation

Vue éclatée

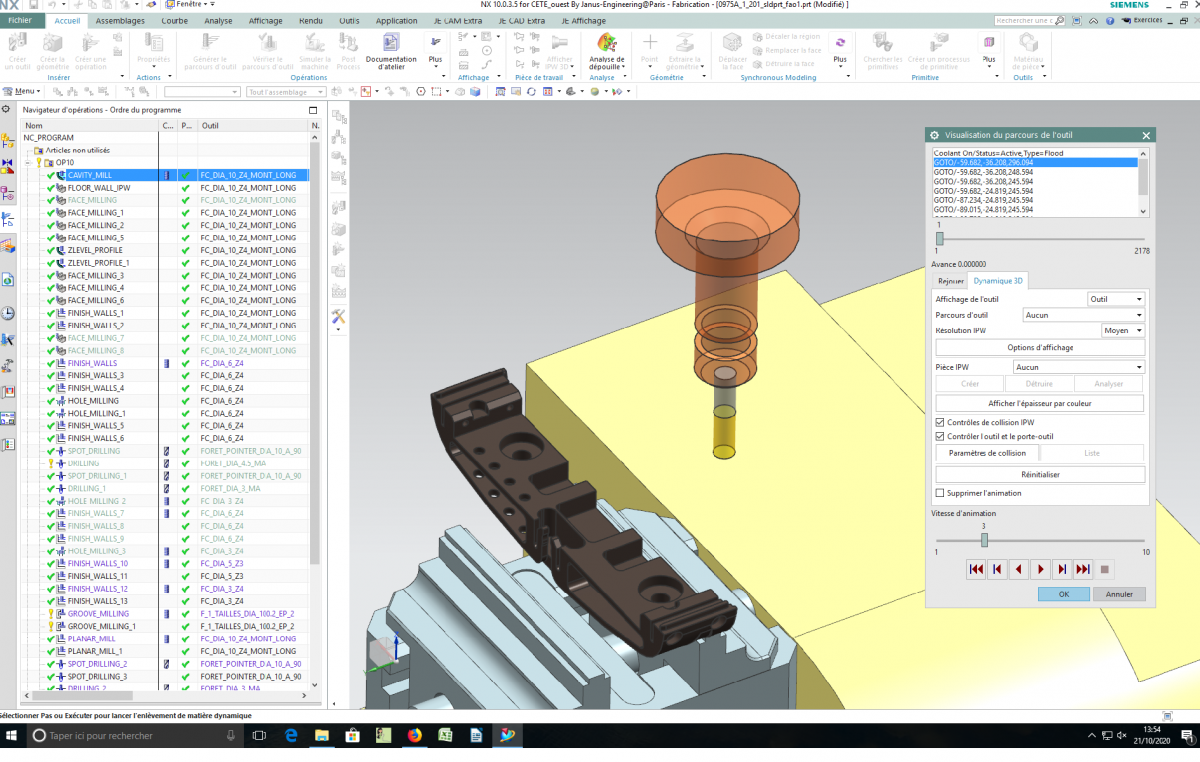
LA FABRICATION INTERNE
Toutes les pièces mécaniques ont été réalisées au CECP à partir des fichiers informatiques de conception (CFAO)
LA FABRICATION EXTERNE
La coque a été réalisée en impression 3D par une société extérieure, par frittage de poudre non chargée, à partir du fichier CAO
LE MONTAGE
Toutes les pièces mécaniques et composants sont assemblés, le câblage réalisé entre les différentes fournitures électroniques.
Le robot termine
Les dimensions finales du robot sont 614 mm en longueur, 432 mm en largeur et 228 mm en hauteur (hors antennes arrières). La masse de l'ensemble est proche de 11 kg.
La suite
Le robot a été remis à l'Unité Eclairage et Lumière et Polytech en octobre 2020 pour la suite de leur travail. Bon courage à eux