



Actualité de l'Equipe projet de recherche STI : Systèmes de Transports Intelligents, vers plus de sécurité et d’intégration aux territoires durables
Découvrez l'équipe, ses enjeux, ses membres, son actualité... en consultant sa page
Pour relever ce challenge, l’objectif de la thèse préparée par Boris Quétard était d’approfondir les connaissances sur le lien entre prise d’information et prise de décision. Cela afin de développer, à terme, des systèmes de perception « bio-inspirés » permettant de reproduire, puis dépasser les capacités cognitives de conducteurs humains (perception, prise de décision mais aussi, à terme, des fonctions d’attention, de mémoire, d’apprentissage). Ainsi le travail réalisé a porté sur ces questions de recherche fondamentale en psychologie cognitive qui ont été appliquée à la situation critique de détections de piétons dans le brouillard.
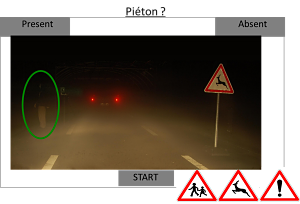
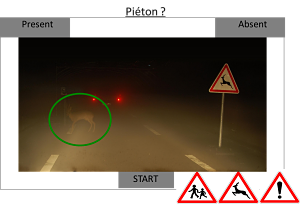
La plateforme PAVIN-BP, plateforme pour véhicules intelligents - « Brouillard-Pluie » opérée par le Cerema a été utilisée afin de reproduire des scènes visuelles de nuit en conditions de brouillard, présentées à des panels d’observateurs, qui avaient pour tâche de détecter des piétons.
L’influence du contexte a été étudiée :
- avec des niveaux de brouillard plus ou moins denses (i.e. de l’incertitude perceptive),
- avec la présence de divers panneaux de signalisation de danger (i.e. de l’incertitude cognitive),
- et avec introduction d’éléments distracteurs comme la présence d’animaux (chevreuil…).
Les résultats de ces recherches ont été présentés brillamment lors d'une soutenance de thèse le 10 Avril 2018. Ils constituent un socle d’informations très riches pour la poursuite de ces travaux à l’interface des sciences humaines et sociales et des sciences pour l’ingénieur.
Boris Quétard est doctorant au Cerema, financé par le Laboratoire d’excellence ImobS3 « Mobilité innovante et Durable », à Clermont-Ferrand. Sa problématique de thèse a été adressée dans le cadre d’une action de recherche PEVMA – « Perception visuelle et anticipation motrice dans les systèmes de traitement de l’information biologiques et artificiels ». Elle a associé divers laboratoires et instituts de recherche, le LAPSCO (Laboratoire de Psychologie Sociale et Cognitive, l’ Institut Pascal, le Cerema à Clermont-Ferrand, le LPNC (Laboratoire de Psychologie Cognitive et Neuro Cognition), le LJK (Laboratoire Jean Kuntzmann), à Grenoble et aussi l’ICST-CNR, (Institute of Cognitive Sciences and Technologies, National Research Council) à Rome, Italie.
Exemple de tests de détection de piéton en condition de brouillard de nuit (Images plateforme PAVIN-BP au Cerema Centre-Est à Clermont-Ferrand.)
Actualité de l'Equipe projet de recherche STI : Systèmes de Transports Intelligents, vers plus de sécurité et d’intégration aux territoires durables
Découvrez l'équipe, ses enjeux, ses membres, son actualité... en consultant sa page